18/03/2011
Un robot para tareas
submarinas que no requiere de ningún operario para funcionar.
Este ha sido el prototipo que con todo éxito han probado los
investigadores del Proyecto Nacional
RAUVI, que lograron que el robot recuperara un objeto
similar a la caja negra de una aeronave sin la dirección de
ningún operario.
El experimento se realizó en dos fases, en la primera de las
cuales el vehículo en el que estaba anclado el robot bajó al
fondo de la piscina para hacer un reconocimiento de la zona
aplicando las técnicas de visión computacional y trazó un mapa.
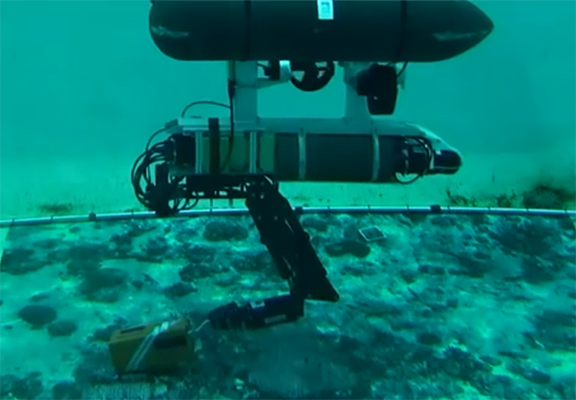
En la siguiente etapa, se le indicó al robot el objeto que debía
recuperar (una caja negra), y el vehículo con el brazo robótico
se sumergió de nuevo, buscó el objeto con las características
seńaladas, lo cogió y le sacó a la superficie.
Para lograr su trabajo, el brazo de este robot dispone de cuatro
articulaciones: Dos a la altura del hombro, una en el codo y la
cuarta en la muńeca. Además, cuenta con la apertura de la mano,
similar a una pinza, pero con unas ranuras en forma de T que
permiten anclar ciertas herramientas para coger objetos o anclar
cables.
Aplicaciones y ventajas
El uso de este robot
ayudaría a reducir los esfuerzos económicos y de recursos
humanos inherentes a las intervenciones submarinas, ya que no
serían necesarios los barcos de apoyo o los cables umbilicales.
Tampoco se requerirían los pilotos encargados de teleoperar (en
condiciones que comportan indudable fatiga y estrés) con lo cual
se posibilitaría además la realización de operaciones imposibles
para los sistemas teleoperados.
Se harían más sencillas además las acciones submarinas que
actualmente requieren de una conexión continua por medio de
cable umbilical a un barco de apoyo, lo que no solo afecta la
dinámica del vehículo sino que también limita la distancia de
desplazamiento del robot… Esto sería entonces parte del pasado.
Trabajo de equipo
Estas pruebas se
realizaron en el marco del proyecto RAUVI: AUV Reconfigurable
para intervención, que está financiado con 530 mil euros por el
Ministerio de Ciencia e Innovación espańol, dentro del VI Plan
Nacional de Investigación Científica, Desarrollo e Innovación
Tecnológica 2008-2011.
En este proyecto están participando tres universidades
espańolas: La Universidad de Girona, la Universidad Jaume I (UJI)
y la Universidad de las Islas Baleares, cada una de las
cualestiene bajo su responsabilidad un subproyecto específico.
Así, la UJI es la responsable de la mecánica para la integración
del brazo robótico, el seguimiento visual del objeto de interés,
el control del brazo para tareas de manipulación y la interfaz
de usuario para especificar estas tareas.
Por su parte, la Universidad de Girona es la encargada de
generar los sistemas de navegación y la mecatrónica del vehículo
submarino donde se acopla el robot manipulador; mientras que la
Universidad de las Islas Baleares es la responsable de asistir
en la planificación y guiado de los movimientos necesarios para
conseguir la navegación autónoma del robot, utilizando técnicas
avanzadas de visión computacional.
Acá un par de vídeos que reseńan cómo actúa este robot autónomo
submarino, y la prueba realizada por estas Universidades
espańolas:
Fuente: www.fayerwayer.com


